激光SLAM里程计算法总结(ICP、NDT与运动畸变) |
您所在的位置:网站首页 › ndt 激光 › 激光SLAM里程计算法总结(ICP、NDT与运动畸变) |
激光SLAM里程计算法总结(ICP、NDT与运动畸变)
|
激光里程计算法总结
一、ICP配准二、PL-ICP配准三、NDT配准四、点云的运动畸变
在导航系统中,里程计(Odometry)数据用来
估算机器人位置随时间的改变量;
一、ICP配准
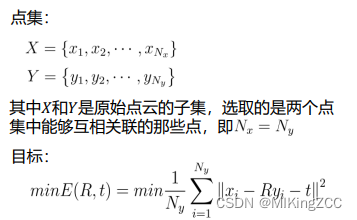
ICP (Iterative Closest Point)迭代最近点算法;  (1)ICP 方法需要配准的两个点云具有一定的重叠度; (2)ICP 选取的所有点进行配准,速度较慢; (3)易收到噪声干扰,陷入局部最优;
二、PL-ICP配准 (1)ICP 方法需要配准的两个点云具有一定的重叠度; (2)ICP 选取的所有点进行配准,速度较慢; (3)易收到噪声干扰,陷入局部最优;
二、PL-ICP配准
正态分布变换 (Normal Distribution Transform) 与ICP不同, NDT 假设点云服从正态分布,我们的目的是找一个姿态,使得当前扫描点位于扫描参考平面的可能性最大。 点云运动畸变产生的原因是一帧点云中的点不是在同一时刻采集的,在采集过程中,雷达随着载体在运动,但是雷达点测量的是物体和雷达之间的距离,所以不同激光点的坐标系就不一样了,会导致周围物体产生重影。 |




 PCL点云库中ICP方法的使用:
PCL点云库中ICP方法的使用: PL-ICP是二阶收敛,ICP是一阶收敛 PL-ICP对初始值更敏感 以点到线的误差为目标函数,PL-ICP的求解精度更高
PL-ICP是二阶收敛,ICP是一阶收敛 PL-ICP对初始值更敏感 以点到线的误差为目标函数,PL-ICP的求解精度更高


 最后概率密度函数可以表示为:
最后概率密度函数可以表示为:  目标函数为:
s
(
p
⃗
)
=
∑
k
=
1
n
p
~
(
T
(
p
⃗
,
x
⃗
k
)
)
s(\vec{p})=\sum_{k=1}^{n}\tilde{p}(T(\vec{p},\vec{x}_k))
s(p
)=k=1∑np~(T(p
,x
k))
目标函数为:
s
(
p
⃗
)
=
∑
k
=
1
n
p
~
(
T
(
p
⃗
,
x
⃗
k
)
)
s(\vec{p})=\sum_{k=1}^{n}\tilde{p}(T(\vec{p},\vec{x}_k))
s(p
)=k=1∑np~(T(p
,x
k))  PCL点云库中NDT方法的使用: (1)NDT 方法需要配准的两个点云具有一定的重叠度; (2)NDT 允许两个点云存在少量差异;
PCL点云库中NDT方法的使用: (1)NDT 方法需要配准的两个点云具有一定的重叠度; (2)NDT 允许两个点云存在少量差异; 
 对于地面点而言,未去畸变时,表现成完整的圆(下图中左边未去畸变,右边为去畸变):
对于地面点而言,未去畸变时,表现成完整的圆(下图中左边未去畸变,右边为去畸变):  点云去畸变基本方法:
点云去畸变基本方法:  在工程中为了减少运动前后方向的畸变,通常在安装时使y轴朝向载体的左右两侧;
(
2
)
(2)
(2)中提到的相对位姿变换
(
R
,
T
)
t
+
1
t
(R,T)^t_{t+1}
(R,T)t+1t可以通过IMU、RTK以及轮速计获得。
在工程中为了减少运动前后方向的畸变,通常在安装时使y轴朝向载体的左右两侧;
(
2
)
(2)
(2)中提到的相对位姿变换
(
R
,
T
)
t
+
1
t
(R,T)^t_{t+1}
(R,T)t+1t可以通过IMU、RTK以及轮速计获得。【本文地址】
今日新闻 |
推荐新闻 |